
K-121 "SHREW”
Shin Cheolmin
신철민
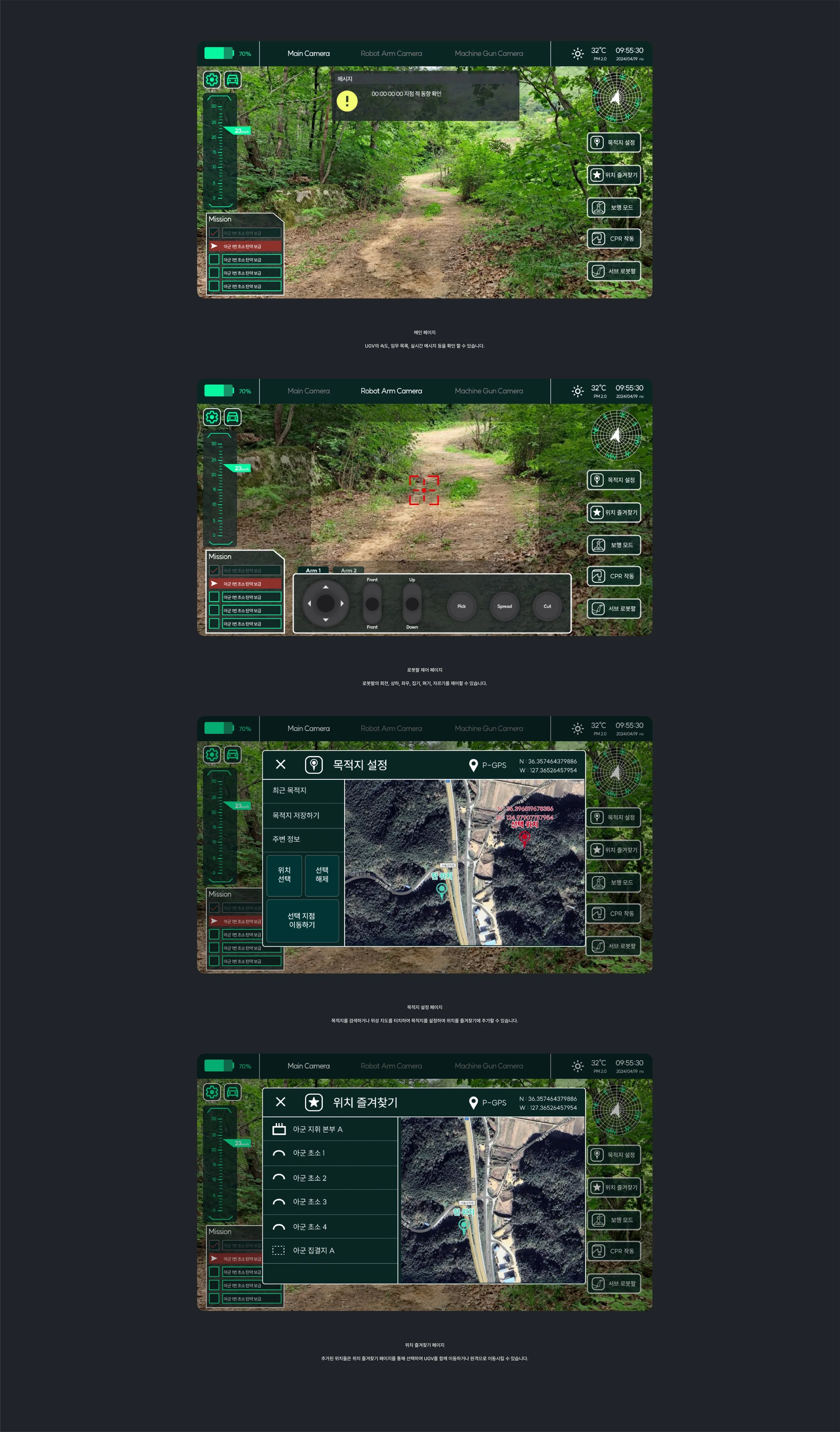
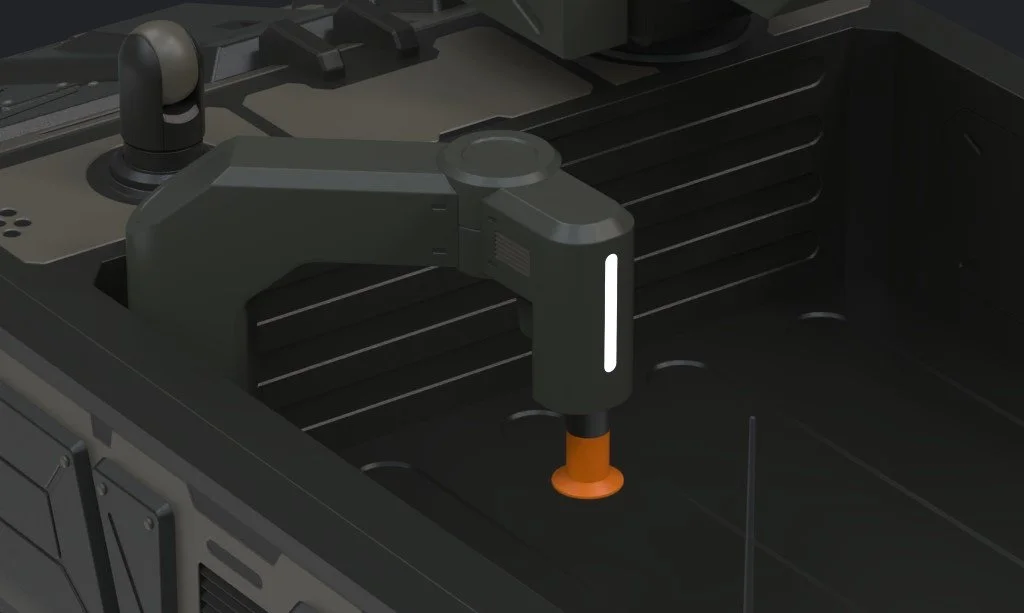
보행 형태로 가변하는 기능으로 험난한 지형을 극복하고 부상병 응급처치와 후송에 특화된 기능 등을 전용 GCS를 통해 제어가 가능한 다목적 군용 UGV입니다.
군 병력이 점차 줄어드는 가운데, 이를 해결할 무기체계로 다목적 무인 차량이 주목받고 있습니다.
다목적 무인 차량은 인명피해 감소, 방호력/기동력 보강 등에 따른 유인 전투 차량의 높은 획득비 절감, 유‧무인 복합 전투체계 활용 가능성 등의 장점이 있습니다.

험지가 많은 우리나라의 지형에서 바퀴 형태는 한계가 있으며 산속에 홀로 고립된 부상병을 후송하기에 어려움이 있습니다.
이를 보행 형태로 가변하여 험난한 지형을 극복하고, 부상병 응급처치와 후송에 특화된 기능을 전용 GCS를 통해 제어하여 피해를 줄이는 방안을 제안합니다.
The Solution


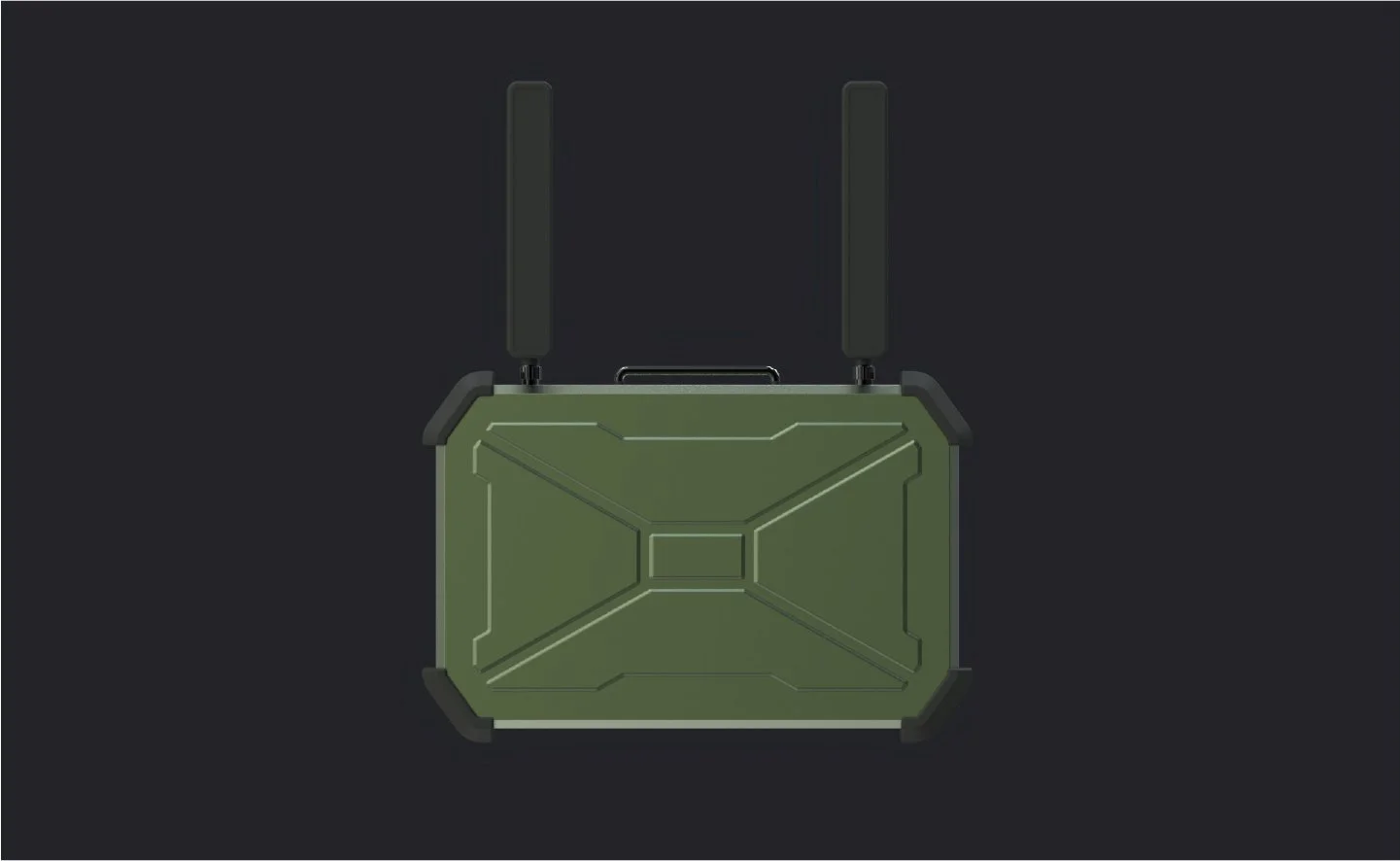
탑재된 미래적인 컨셉의 기술을 고려하여 공상과학 매체에서 나올법한 외형으로 UGV의 디자인을 하였으며 전용 컨트롤러는 실용적이고 기능을 중시한 형태로 컨셉을 정하여 디자인하였습니다.















AUDIOVISUAL
신철민
Shin Cheolmin
cjfals7321@naver.com
Other Works

PA-2 Exo Suit
신철민